








Active Suspension – Hệ thống treo chủ động (Hệ thống treo tích cực) là một loại hệ thống treo ô tô sử dụng hệ thống điều khiển tích hợp để điều khiển chuyển động thẳng đứng của các bánh xe và trục của xe so với khung xe, thay vì hệ thống treo thụ động thông thường chỉ dựa vào các lò xo lớn để duy trì lực đỡ tĩnh và làm giảm chuyển động của bánh xe theo phương thẳng đứng do mặt đường gây ra. Hệ thống treo chủ động được chia thành hai loại: hệ thống treo chủ động thực sự và hệ thống treo thích ứng hoặc bán chủ động. Trong khi hệ thống treo bán thích ứng chỉ thay đổi độ cứng của bộ giảm xóc để phù hợp với điều kiện đường xá hoặc động lực thay đổi, thì hệ thống treo chủ động sử dụng một số loại bộ truyền động để nâng và hạ khung gầm một cách độc lập ở mỗi bánh xe.
Những công nghệ này cho phép các nhà sản xuất ô tô đạt được mức độ cao hơn về chất lượng lái và khả năng xử lý của ô tô bằng cách giữ cho lốp xe luôn vuông góc với mặt đường khi rẽ, ngăn chặn sự tiếp xúc không mong muốn giữa khung xe và mặt đất (đặc biệt là khi đi qua chỗ trũng), và cho phép kiểm soát lực kéo và lái tổng thể tốt hơn. Một máy tính trên xe phát hiện chuyển động của thân xe từ các cảm biến trên khắp xe và sử dụng dữ liệu đó để điều khiển hoạt động của hệ thống treo chủ động và bán chủ động. Hệ thống này hầu như loại bỏ hiện tượng cuộn thân xe (Body roll) trong nhiều tình huống lái xe bao gồm vào cua, tăng tốc và phanh. Khi được sử dụng trên các phương tiện thương mại như xe buýt, hệ thống treo chủ động cũng có thể được sử dụng để tạm thời hạ thấp sàn xe, nhờ đó giúp hành khách lên và xuống xe dễ dàng hơn.

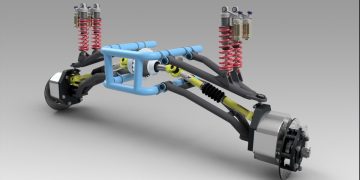
Nguyên lý Active Suspension
Lý thuyết Skyhook cho rằng hệ thống treo lý tưởng sẽ cho phép phương tiện duy trì tư thế ổn định như thể bị treo bằng một cái móc tưởng tượng trên bầu trời, không bị ảnh hưởng bởi điều kiện đường sá.
Vì Skyhook thực tế rõ ràng là không thực tế, nên các hệ thống treo chủ động thực sự dựa trên hoạt động của bộ truyền động. Đường tưởng tượng (của gia tốc thẳng đứng bằng 0) được tính toán dựa trên giá trị được cung cấp bởi cảm biến gia tốc lắp trên thân xe. Các phần tử động chỉ bao gồm lò xo tuyến tính và bộ giảm chấn tuyến tính; do đó, không cần phải tính toán phức tạp.

Một chiếc xe tiếp xúc với mặt đất thông qua lò xo và giảm chấn trong hệ thống treo giảm chấn lò xo bình thường. Để đạt được mức độ ổn định giống như lý thuyết Skyhook, phương tiện phải tiếp xúc với mặt đất thông qua lò xo và đường tưởng tượng với bộ giảm chấn. Về lý thuyết, trong trường hợp hệ số giảm chấn đạt giá trị vô hạn, xe sẽ ở trạng thái cố định hoàn toàn với đường thẳng tưởng tượng, xe không bị rung lắc.
Hệ thống treo chủ động, lần đầu tiên được giới thiệu, sử dụng các bộ truyền động riêng biệt có thể tác dụng lực độc lập lên hệ thống treo để cải thiện các đặc tính lái. Hạn chế của thiết kế này là chi phí cao, thêm sự phức tạp và khối lượng lớn của thiết bị, và yêu cầu bảo trì thường xuyên đối với một số triển khai. Việc bảo trì có thể yêu cầu các công cụ chuyên dụng và một số cấn đề có thể khó chẩn đoán.

Các hệ thống chủ động hoàn toàn
Truyền động thủy lực (Hydraulic actuation)
Hệ thống treo được kích hoạt bằng thủy lực được điều khiển bằng cách sử dụng thủy lực. Ví dụ đầu tiên xuất hiện vào năm 1954, với hệ thống treo khí nén được phát triển bởi Paul Magès tại Citroën. Áp suất thủy lực được cung cấp bởi một bơm thủy lực piston hướng tâm áp suất cao. Các cảm biến liên tục theo dõi chuyển động của thân xe và mức độ di chuyển của xe, liên tục cung cấp dữ liệu mới cho bộ điều chỉnh độ cao thủy lực. Chỉ trong vài phần nghìn giây, hệ thống treo tạo ra phản lực để nâng hoặc hạ thân xe. Trong quá trình lái xe, khí ni-tơ được bọc kín sẽ nén ngay lập tức, mang lại khả năng nén gấp sáu lần so với lò xo thép được sử dụng trên các phương tiện cho đến thời điểm này.
Trên thực tế, hệ thống này luôn kết hợp hệ thống treo tự cân bằng mong muốn và các tính năng của hệ thống treo có thể điều chỉnh độ cao, với tính năng sau hiện được gắn với tốc độ xe để cải thiện hiệu suất khí động học khi xe tự hạ thấp độ cao ở tốc độ cao.
Hệ thống này hoạt động rất tốt khi lái xe thẳng về phía trước, kể cả trên các bề mặt không bằng phẳng, nhưng ít kiểm soát được độ cứng cuộn roll stiffness.
Hàng triệu phương tiện sản xuất đã được chế tạo với các biến thể trên hệ thống này.

Truyền động điện tử của hệ thống treo thủy lực (Electronic actuation of hydraulic suspension)
Colin Chapman đã phát triển khái niệm ban đầu về quản lý hệ thống treo thủy lực bằng máy tính vào những năm 1980 để cải thiện khả năng vào cua của xe đua. Lotus đã trang bị và phát triển một hệ thống nguyên mẫu cho chiếc Excel 1985 với hệ thống treo chủ động điện-thủy lực, nhưng chưa bao giờ chào bán nó cho công chúng, mặc dù nhiều chiếc xe trình diễn đã được chế tạo cho các nhà sản xuất khác.
Các cảm biến liên tục theo dõi chuyển động của thân xe và mức độ di chuyển của xe, liên tục cung cấp dữ liệu mới cho máy tính. Khi máy tính nhận và xử lý dữ liệu, nó sẽ vận hành các servo thủy lực, được gắn bên cạnh mỗi bánh xe. Gần như ngay lập tức, hệ thống treo được điều chỉnh bằng servo tạo ra lực phản tác dụng để thân xe nghiêng, bổ nhào và ngồi xổm trong khi điều khiển lái.
Williams Grand Prix Engineering đã chuẩn bị một hệ thống treo chủ động do nhà khí động học Frank Dernie nghĩ ra cho những chiếc xe Công thức 1 của đội vào năm 1992, tạo ra những chiếc xe thành công đến mức Fédération Internationale de l’Automobile quyết định cấm công nghệ này để giảm khoảng cách giữa đội Williams F1 và các đối thủ cạnh tranh.
Hệ thống treo công nghệ chủ động bằng máy tính (Computer Active Technology Suspension – CATS) điều phối sự cân bằng tốt nhất có thể giữa chất lượng xe và khả năng xử lý bằng cách phân tích các điều kiện đường xá và thực hiện tới 3.000 điều chỉnh mỗi giây đối với cài đặt hệ thống treo thông qua bộ giảm chấn điều khiển điện tử.
Mercedes-Benz CL-Class (C215) 1999 đã giới thiệu Hệ thống Kiểm soát Thân xe Chủ động Active Body Control, trong đó các động cơ servo thủy lực áp suất cao được điều khiển bằng máy tính điện tử và tính năng này vẫn khả dụng. Xe có thể được thiết kế để chủ động nghiêng vào các đường cong nhằm cải thiện sự thoải mái cho người ngồi trên xe.
Thanh chống lật chủ động (Active anti-roll bar)
Khi ô tô rẽ, trọng tâm của nó nghiêng ra bên ngoài, nén hệ thống treo bên ngoài và giải nén bên trong. Một thanh chống lật, kết nối cả hai bên của hệ thống treo trên một trục, hạn chế mức độ khác biệt mà hệ thống treo có thể có, và do đó làm giảm khả năng lăn của thân xe.
Không giống như thanh chống lật thông thường, không thể điều chỉnh khi đang di chuyển, Active anti-roll bar sử dụng một động cơ ở giữa thanh để tác dụng mô-men xoắn đối lập ở hai đầu. Điều này làm cứng thanh chống lật trong thời gian thực, cho phép chiếc xe điều chỉnh khi xe lăn giữa góc cua.

Hệ thống phục hồi điện từ trường (Electromagnetic recuperative)
Trong những chiếc ô tô sản xuất được điều khiển điện tử hoàn toàn chủ động, ứng dụng động cơ servo và động cơ điện kết hợp với điện toán cho phép vào cua bằng phẳng và phản ứng tức thì với điều kiện đường xá.
Tập đoàn Bose có một bằng chứng về mô hình khái niệm. Người sáng lập Bose, Amar Bose, đã nghiên cứu về các hệ thống treo kỳ lạ trong nhiều năm khi ông còn là giáo sư MIT.
Hệ thống treo chủ động điện từ sử dụng các động cơ điện từ tuyến tính gắn vào mỗi bánh xe. Nó cung cấp phản hồi cực nhanh và cho phép tái tạo năng lượng tiêu thụ bằng cách sử dụng động cơ làm máy phát điện. Điều này gần như khắc phục được các vấn đề về thời gian phản hồi chậm và mức tiêu thụ điện năng cao của hệ thống thủy lực. Công nghệ hệ thống treo chủ động điều khiển điện tử (ECASS) đã được cấp bằng sáng chế bởi Trung tâm Cơ điện Đại học Texas vào những năm 1990 và đã được L-3 Electronic Systems phát triển để sử dụng trên các phương tiện quân sự. Humvee được trang bị ECASS đã vượt qua các thông số kỹ thuật hiệu suất cho tất cả các đánh giá hiệu suất về công suất hấp thụ, độ ổn định và khả năng xử lý.
Bánh xe chủ động, tích cực (Active Wheel)
Bánh xe Chủ động Active Wheel của Michelin từ năm 2004 kết hợp một động cơ hệ thống treo điện trong bánh xe để điều khiển phân bổ mô-men xoắn, lực kéo, chuyển động quay chuyển hướng, độ nghiêng, độ lăn và giảm xóc của hệ thống treo cho bánh xe đó, bên cạnh một động cơ điện kéo trong bánh xe.

Hệ thống treo cơ điện chủ động của Audi được giới thiệu vào năm 2017. Hệ thống này dẫn động từng bánh riêng biệt và thích ứng với các điều kiện đường xá phổ biến. Mỗi bánh xe có một động cơ điện chạy bằng hệ thống điện chính 48 vôn. Các thành phần bổ sung bao gồm các bánh răng, một ống quay cùng với thanh xoắn titan bên trong và một đòn bẩy tác động lên hệ thống treo lên tới 1.100 Nm (811,3 lb-ft) thông qua một thanh khớp nối. Nhờ có camera phía trước, chiếc sedan này có thể phát hiện sớm những va chạm trên đường và điều chỉnh hệ thống treo chủ động một cách dự đoán. Ngay cả trước khi xe gặp chỗ gập ghềnh trên đường, chức năng xem trước do Audi phát triển sẽ truyền lượng hành trình phù hợp đến các bộ truyền động và chủ động kiểm soát hệ thống treo. Các động cơ do máy tính điều khiển có thể cảm nhận được sự không hoàn hảo trên đường và có thể nâng hệ thống treo lên khỏi bánh xe sẽ vượt qua sự nhấp nhô, do đó hỗ trợ chất lượng chuyến đi. Hệ thống sẽ điều khiển các động cơ ở bên ngoài đẩy lên hoặc kéo xuống hệ thống treo khi vào cua. Điều này sẽ giúp lái xe phẳng hơn và giảm hiện tượng lật thân xe quanh các góc cua, từ đó có nghĩa là khả năng xử lý tự tin hơn.
Hệ thống Thích ứng và bán chủ động
Hệ thống thích ứng hoặc bán chủ động chỉ có thể thay đổi hệ số cản nhớt của bộ giảm xóc chứ không bổ sung năng lượng cho hệ thống treo. Hệ thống treo thích ứng nhìn chung có thời gian phản hồi chậm và số lượng giá trị hệ số giảm chấn hạn chế, nhưng hệ thống treo bán chủ động có thời gian phản hồi gần vài mili giây và có thể cung cấp nhiều giá trị giảm chấn. Do đó, hệ thống treo thích ứng thường chỉ đề xuất các chế độ lái khác nhau (thoải mái, bình thường, thể thao…) tương ứng với các hệ số giảm xóc khác nhau, trong khi hệ thống treo bán chủ động điều chỉnh giảm xóc theo thời gian thực, tùy thuộc vào điều kiện đường xá và động lực học của ô tô. Mặc dù sự can thiệp của chúng bị hạn chế (ví dụ, lực điều khiển không bao giờ có hướng khác với vectơ vận tốc hiện tại của hệ thống treo), hệ thống treo bán chủ động ít tốn kém hơn để thiết kế và tiêu thụ ít năng lượng hơn nhiều. Trong thời gian gần đây, nghiên cứu về hệ thống treo bán chủ động đã tiếp tục phát triển về khả năng của chúng, thu hẹp khoảng cách giữa hệ thống treo bán chủ động và hoàn toàn chủ động.
Solenoid Điện từ / van được kích hoạt
Đây là loại cơ bản và kinh tế nhất của hệ thống treo bán chủ động. Chúng bao gồm một van điện từ làm thay đổi dòng chảy của môi trường thủy lực bên trong bộ giảm xóc, do đó thay đổi các đặc tính giảm xóc của thiết lập hệ thống treo. Các cuộn điện từ được nối với máy tính điều khiển, máy tính này sẽ gửi cho chúng các lệnh tùy thuộc vào thuật toán điều khiển (thường được gọi là kỹ thuật “Sky-Hook”). Loại hệ thống này được sử dụng trong hệ thống treo Computer Command Ride (CCR) của Cadillac. Chiếc xe sản xuất đầu tiên là Toyota Soarer với Hệ thống treo điều biến điện tử Toyota bán chủ động, từ năm 1983 (Toyota Electronic Modulated Suspension).
Giảm chấn từ lưu biến (Magnetorheological damper)
Một phương pháp khá gần đây khác kết hợp bộ giảm chấn từ lưu biến với thương hiệu MagneRide. Ban đầu nó được phát triển bởi Tập đoàn Delphi cho GM và là tiêu chuẩn, giống như nhiều công nghệ mới khác, cho Cadillac STS (từ mẫu 2002) và trên một số mẫu GM khác từ năm 2003. Đây là bản nâng cấp dành cho hệ thống bán chủ động (“hệ thống treo cảm biến đường tự động”) được sử dụng trên các loại xe GM cao cấp trong nhiều thập kỷ. Nó cho phép, cùng với các máy tính hiện đại nhanh hơn, thay đổi độ cứng của tất cả các hệ thống treo bánh xe một cách độc lập.
Hệ thống này đã được phát triển trong 25 năm. Chất lỏng giảm chấn có chứa các hạt kim loại. Thông qua máy tính tích hợp, các đặc tính tuân thủ của bộ giảm chấn được điều khiển bằng nam châm điện. Về cơ bản, việc tăng cường độ dòng điện vào mạch từ giảm chấn sẽ làm tăng từ thông mạch. Điều này lần lượt làm cho các hạt kim loại thay đổi sự liên kết của chúng, làm tăng độ nhớt của chất lỏng, do đó làm tăng tốc độ nén/phục hồi, trong khi việc giảm làm dịu tác dụng của bộ giảm chấn bằng cách sắp xếp các hạt theo hướng ngược lại. Chính điện trường do nam châm điện sinh ra đã làm thay đổi hướng sắp xếp của các hạt kim loại. Thông tin từ cảm biến bánh xe (về độ mở rộng của hệ thống treo), hệ thống lái, cảm biến gia tốc – và các dữ liệu khác, được sử dụng để tính toán độ cứng tối ưu tại thời điểm đó. Ví dụ, phản ứng nhanh của hệ thống (mili giây) cho phép thực hiện chuyển động nhẹ nhàng hơn bằng một bánh xe qua một khúc cua trên đường tại một thời điểm cụ thể.






{kind=link}