








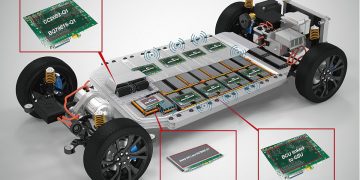
Một thành phần quan trọng của hệ thống thông tin liên lạc ô tô, tức là Mạng kết nối cục bộ (LIN) thường được sử dụng cùng với các công nghệ khác như Mạng khu vực điều khiển (CAN). LIN là một giao thức liên lạc đơn giản và tiết kiệm chi phí, có giá trị nhất định trong các hệ thống con ô tô, nơi không cần đến sự mạnh mẽ và tốc độ của CAN. Trong phần này, XecoV sẽ giải thích những điều cơ bản và tính năng của LIN và tích hợp của nó với CAN.
LIN – Local Interconnect Network là gì
LIN (Mạng kết nối cục bộ) là một giao thức mạng được sử dụng để giao tiếp giữa các thành phần trong xe hiện đại. Đây là giao thức nối tiếp một dây giá rẻ hỗ trợ giao tiếp lên đến 19,2 Kbit/giây với chiều dài bus tối đa là 40 mét (131,2 ft).
Mạng kết nối cục bộ (LIN) được phát triển như một tiêu chuẩn bus bổ sung cho Mạng khu vực điều khiển (bus CAN) để giải quyết nhu cầu về một mạng tiết kiệm chi phí cho các thiết bị hiệu suất thấp hơn trong xe. Mặc dù mạng CAN đã có trong xe, nhưng băng thông cao và khả năng phát hiện lỗi tiên tiến của nó là quá mức cần thiết (và do đó, quá tốn kém) đối với các ứng dụng hiệu suất thấp hơn như bộ điều khiển ghế ngồi và cửa sổ. Các xe ngày nay sử dụng kết hợp CAN cho hệ thống truyền động và giao tiếp thân xe, LIN cho các ứng dụng chi phí thấp như thiết bị điện tử thân xe và FlexRay cho giao tiếp dữ liệu đồng bộ tốc độ cao.
Lịch sử
Sau khi CAN được phát triển vào cuối những năm 1980, các nhà sản xuất ô tô ngày càng sử dụng nó để kết nối nhiều Bộ điều khiển điện tử (ECU) khác nhau với nhau bên trong ô tô. Tuy nhiên, đối với các chức năng ít quan trọng hơn, tốc độ thấp hơn, bus CAN trở nên quá đắt để triển khai. Các nhà sản xuất bắt đầu sử dụng nhiều công nghệ truyền thông nối tiếp để giải quyết vấn đề này, nhưng điều này gây ra các vấn đề về khả năng tương thích. Một liên minh bao gồm năm nhà sản xuất ô tô châu Âu (Audi, BMW, Mercedes-Benz, Volkswagen và Volvo), cùng với các công ty công nghệ Volcano Automotive Group (nay là Mentor Graphics) và Motorola (nay là NXP) được thành lập vào cuối những năm 1990 để phát triển thông số kỹ thuật LIN và phiên bản đầu tiên được công bố vào năm 1999. Liên đoàn LIN đã phát triển và duy trì thông số kỹ thuật cho đến phiên bản 2.2 vào năm 2010. Năm 2013, thông số kỹ thuật LIN đã được chuyển đến Tổ chức Tiêu chuẩn hóa Quốc tế (ISO) và được phát hành dưới dạng tiêu chuẩn ISO 17987 vào năm 2016.
Khái niệm cơ bản và đặc điểm của LIN
Đối với giao tiếp giữa các thành phần của xe, LIN (một giao thức mạng nối tiếp) được sử dụng. Trong môi trường ô tô, nó được xem xét cho các ứng dụng chi phí thấp và tốc độ thấp.

Kiến trúc Master-Slave (hoặc Leader – Follower): LIN sử dụng kiến trúc master-Slave, trong đó một master duy nhất điều khiển hoạt động giao tiếp trong khi nhiều Slave cung cấp phản hồi.
Giống như CAN, LIN có bộ điều khiển LIN, bộ vi điều khiển máy chủ và bộ thu phát LIN. LIN thường hoạt động như một tín hiệu có nguồn gốc từ pin, với mỗi nút có một điện trở kéo lên được kết nối với pin và một công tắc cực thu mở có khả năng hạ thấp tín hiệu LIN. Mức độ lặn tương ứng với bất kỳ mức độ nào vượt quá 60% Vbat, trong khi mức độ trội được định nghĩa là bất kỳ mức độ nào giảm xuống dưới 40% Vbat. Một khung LIN thông thường bao gồm hai phân đoạn vì LIN hoạt động trong giao thức master-slave (chủ-tớ). Ban đầu, master khởi tạo giao tiếp bằng cách thăm dò slave, sau đó slave cung cấp phản hồi của mình.

LIN được thiết kế có chủ đích để chịu được nhiều biến động khác nhau về nguồn cung cấp pin, bao gồm cả khởi động nguội và gián đoạn nhỏ.
- Tốc độ dữ liệu: Trái ngược với CAN, LIN được thiết kế riêng để truyền dữ liệu chậm hơn, thường hoạt động ở tốc độ dữ liệu khoảng 19,2 kbps.
- Giao tiếp dây đơn: Để giảm chi phí và độ phức tạp, LIN sử dụng một dây tín hiệu duy nhất. Đất là đường phản hồi của tín hiệu.
- Giao tiếp xác định: Lịch trình LIN giúp giao tiếp có thể dự đoán được bằng cách xác định thời gian chính xác cho mỗi tin nhắn được truyền đi.
- Phát hiện lỗi: Mặc dù LIN không có khả năng xử lý lỗi mở rộng như CAN, nhưng nó vẫn cung cấp khả năng phát hiện lỗi cơ bản như CRC (Kiểm tra dự phòng tuần hoàn hoặc Checksum).
- Chế độ ngủ: LIN có chế độ ngủ công suất thấp giúp tiết kiệm năng lượng khi không cần giao tiếp. Khả năng này đặc biệt quan trọng để giảm tình trạng hao pin vì LIN hoạt động trực tiếp từ nguồn điện của pin.
- Chuẩn hóa: LIN tuân thủ tiêu chuẩn ISO-17897 do Liên đoàn LIN thiết lập, thúc đẩy khả năng tương tác giữa nhiều nhà cung cấp khác nhau.
Kiến trúc
Bus LIN là mạng tuần tự phát sóng với một nút dẫn đầu (Leader) và tối đa 15 nút theo sau (Follower) được cấu hình trên một dây 12V duy nhất dài tới 40 mét. Một nút Leader chứa cả tác vụ Leader và tác vụ theo sau, và tác vụ Leader kiểm soát mọi giao tiếp qua bus LIN. Các nút theo sau chỉ chứa một tác vụ theo sau và không thể bắt đầu giao tiếp; chúng chỉ có thể (1) bỏ qua, (2) đăng ký (nhận) hoặc (3) công bố phản hồi. Nút Leader cũng có thể hoạt động như một nút theo sau bằng cách trả lời các tin nhắn của chính nó.
Các nút LIN thường bao gồm một bộ vi điều khiển và một bộ thu phát LIN, nhưng phần cứng hoặc ASIC tùy chỉnh cũng có thể được sử dụng. Các cảm biến, bộ truyền động hoặc các thiết bị điều khiển khác được kết nối vào mạng LIN thông qua MCU. Sự sắp xếp này của nút Leader LIN và các nút theo sau của nó như thể hiện trong Hình 1 thường được gọi là “cụm LIN” (LIN cluster).

Thông thường, một nút Leader LIN sẽ truyền một yêu cầu, được gọi là Header, đến từng nút theo sau. Hành động này kích hoạt các nút theo sau để trả về phản hồi (Response) với tối đa tám byte dữ liệu. Header và Response cùng nhau được gọi là khung tin nhắn LIN. Các trường sau tạo nên Header và Response của khung LIN.
Header
- Break – Tối thiểu 13 + 1 bit nhưng thường là 18 + 2 bit; đóng vai trò là Bắt đầu của Khung.
- Sync – Được xác định trước là Hex0x55 (01010101) và cho phép các nút LIN xác định tốc độ truyền được nút Leader sử dụng để chúng có thể đồng bộ.
- Identifier – ID 6 bit theo sau là 2 bit chẵn lẻ. ID xác định từng tin nhắn LIN được gửi và nút nào nên phản ứng với tin nhắn đó. Các bit chẵn lẻ hỗ trợ những nút Follower trong việc xác định tính hợp lệ của ID để chúng biết liệu có nên Bỏ qua việc truyền dữ liệu, lắng nghe nó hay xuất bản dữ liệu để phản hồi.
Response
- Data – Nút Follower có thể phản hồi tiêu đề bằng 2, 4 hoặc 8 byte dữ liệu. Độ dài dữ liệu phụ thuộc vào phạm vi ID với các giá trị 0-31 biểu thị 2 byte, 32-47 biểu thị 4 byte và 48-63 biểu thị 8 byte.
- Checksum – trường 8 bit; đảm bảo tính hợp lệ của khung LIN.

Các loại khung
Có sáu loại khung LIN khác nhau, mặc dù loại khung đầu tiên – Unconditional – thường được sử dụng nhất. Sự khác biệt giữa các loại khác nhau chỉ liên quan đến thời gian truyền hoặc nội dung của các byte dữ liệu; cấu trúc của một khung không thay đổi giữa các loại khung. Chúng ta hãy xem các loại khung khác nhau được sử dụng.
- Không điều kiện Unconditional (ID 0-59) – Đây là hình thức giao tiếp mặc định được sử dụng trên bus LIN trong đó leader gửi header yêu cầu thông tin từ một follower cụ thể và follower sẽ phản ứng tương ứng.
- Sự kiện được kích hoạt (ID 0-59) Event triggered – Leader thăm dò nhiều follower và nếu dữ liệu của follower đã được cập nhật, nó sẽ phản hồi bằng ID được bảo vệ của mình trong byte dữ liệu đầu tiên. Xung đột có thể xảy ra nếu nhiều follower phản hồi khung do sự kiện kích hoạt. Trong trường hợp này, Leader mặc định gửi một khung không điều kiện (unconditional).
- Sporadic (ID 0-59) – Tiêu đề/header sporadic chỉ được gửi bởi leader nếu nó biết một follower cụ thể đã cập nhật dữ liệu. Trong trường hợp này, leader hoạt động như một follower và cung cấp phản hồi cho header của chính nó cho phép nó cung cấp thông tin động cho các nút follower.
- Chẩn đoán Diagnostic (ID 60-61) – ID 60-61 được sử dụng để đọc chẩn đoán với ID 60 được sử dụng cho yêu cầu của leader, 61 cho phản hồi của follower. Khung luôn chứa 8 byte dữ liệu.
- Người dùng xác định User Defined (ID 62) – Có thể chứa bất kỳ loại thông tin nào.
- Reserved (ID 63) – Không được sử dụng trong LIN 2.0.
Hoạt động
Như đã nêu trước đó, mọi giao tiếp trên bus LIN đều được khởi tạo bởi node Leader. Node Leader kiểm soát trình tự của các khung tin nhắn, được cố định trong bảng lịch trình. Bảng lịch trình sắp xếp các khung tin nhắn thành các slot và thiết lập khoảng thời gian giữa thời điểm bắt đầu của một khung và thời điểm bắt đầu của khung tiếp theo. Các slot khung LIN được lên lịch dựa trên đơn vị thời gian cụm LIN thường là 5-10 mili giây.
Trong một cụm LIN riêng lẻ, nút Leader lặp qua từng nút theo sau với yêu cầu thông tin và mỗi nút theo sau phản hồi bằng dữ liệu khi được thăm dò. Dữ liệu được truyền dưới dạng byte dữ liệu theo thứ tự qua bus LIN, với tốc độ truyền tối đa là 20 kbit/giây. Tuy nhiên, LIN thực sự hữu ích khi nhiều cụm LIN được kết nối qua bus CAN trong một hệ thống lớn hơn, chẳng hạn như xe cộ, như thể hiện trong Hình 3 bên dưới.
Chúng ta hãy xem một ví dụ thực tế cho việc này. Hình 3 chỉ ra bốn cụm LIN được kết nối bên trong một chiếc xe biểu thị bốn cửa. Nếu tài xế muốn hạ cửa sổ hành khách, họ sẽ nhấn một nút trên cửa tài xế. Điều này kích hoạt một cụm LIN gửi tin nhắn đến một cụm LIN khác qua bus CAN, yêu cầu cụm LIN thứ hai hạ cửa sổ hành khách. Tương tự như vậy, tài xế có thể nhấn một nút trên cửa của mình để khóa tất cả các cửa xe. Cụm LIN sẽ lại gửi một tin nhắn đến bus CAN, bus này sẽ truyền tin nhắn đến các cụm LIN khác, cảnh báo họ khóa cửa.

Phát hiện lỗi
Theo giao thức LIN, phát hiện lỗi được xử lý bởi các tác vụ theo dõi follower sử dụng trường tổng kiểm tra checksum, loại bỏ gánh nặng giám sát lỗi khỏi tác vụ leader. Nếu một follower gặp lỗi trong một khung (được gọi là lỗi bit), nó sẽ hủy xử lý khung cho đến khi phát hiện ra tiêu đề tiếp theo do leader truyền. Trong thông số kỹ thuật LIN ban đầu, phép tính checksum cổ điển chỉ được thực hiện trên các byte dữ liệu. Kể từ khi LIN 2.2 được công bố, một thuật toán tổng kiểm tra nâng cao đã được sử dụng để bảo vệ các byte dữ liệu cũng như ID được bảo vệ.
LIN cũng có thể cung cấp chức năng báo cáo lỗi lên mạng. Bất cứ khi nào một khung được nhận hoặc truyền bởi một nút follower có lỗi trong trường phản hồi, follower được yêu cầu báo cáo một bit trạng thái Response_Error cho leader trong một trong các khung được truyền của nó.
Quản lý năng lượng
Ngoài việc tiết kiệm chi phí, bus LIN còn tiết kiệm điện năng. Điều này được thực hiện bằng cách sử dụng hai chế độ: Sleep và Active. Khi nút Leader gửi yêu cầu chẩn đoán (ID 60), mỗi nút Follower trên bus sẽ tự động chuyển sang chế độ Ngủ sau bốn giây không hoạt động của bus. Một khung đánh thức có thể được gửi bởi bất kỳ nút nào yêu cầu hoạt động trên bus, nút Leader thực hiện theo lịch trình của nó hoặc nút Follower được kích hoạt bởi ứng dụng phần mềm nội bộ của nó (tức là nhấn nút). Sau khi nhận được tín hiệu đánh thức, tất cả các nút chạy qua các quy trình khởi động của chúng và đợi nút Leader gửi trường Phá vỡ.
Tích hợp LIN với CAN
Để tận dụng những điểm mạnh của cả hai giao thức, việc tích hợp LIN với CAN bên trong ECU là một phương pháp phổ biến trong thiết kế ô tô:
- Mạng phân cấp (Hierarchical Networking): LIN quản lý các chức năng ít quan trọng hơn như điều khiển cửa sổ hoặc ghế ngồi. Trong khi đó, CAN, nổi tiếng với khả năng xử lý lỗi mạnh mẽ và tốc độ được cải thiện, thường được sử dụng trong các hệ thống quan trọng như điều khiển động cơ. Phương pháp phân cấp này giúp tăng hiệu quả về chi phí và hiệu suất tổng thể.
- Chức năng cổng (Gateway Function): Máy chủ LIN thường kết nối với mạng CAN, hoạt động như một cổng trong hệ thống CAN-LIN kết hợp và cho phép trao đổi dữ liệu giữa LIN và mạng CAN.
- Giải pháp tiết kiệm chi phí: Thông qua việc tích hợp cả CAN và LIN, các nhà sản xuất có thể đảm bảo truyền thông mạnh mẽ, tốc độ cao cho các thành phần quan trọng (sử dụng CAN), đồng thời triển khai giải pháp tiết kiệm chi phí cho các hệ thống con ít quan trọng hơn (sử dụng LIN).
- Thiết kế đơn giản: Việc kết hợp cho phép thiết kế hiệu quả hơn bằng cách khai thác LIN cho các thiết bị ngoại vi cơ bản, do đó đơn giản hóa việc đi dây và điều khiển phức tạp.
- Chức năng nâng cao: Để nâng cao chức năng tổng thể, chẳng hạn như hệ thống kiểm soát khí hậu tiên tiến hoặc hệ thống chiếu sáng thích ứng, một số hệ thống có thể tận dụng cả CAN và LIN.
Lợi ích của LIN
Tóm lại các điểm trên, bus LIN cung cấp một số lợi thế cho các trường hợp sử dụng ô tô và công nghiệp. Nó đặc biệt hữu ích khi bổ sung cho bus CAN bằng cách giảm tải các thiết bị khi tốc độ và khả năng chịu lỗi không quan trọng.
- Chi phí thấp hơn – Việc cấy ghép một dây của LIN, không có phí cấp phép và các nút rẻ hơn khiến nó trở thành một bus có chi phí thấp hơn đáng kể so với CAN về tổng thể.
- Linh kiện hàng hóa – Số lượng nút ô tô đã tăng từ 200 triệu vào năm 2010 lên 700 triệu ngày nay. Không thể phủ nhận lợi thế của các thành phần rẻ hơn, nhỏ hơn và dễ có hơn cho các nút Follower LIN.
- Có tính xác định – Vì nút Leader ủy quyền các khe khung được xác định trước trên bus LIN nên các khung thông báo có thể dự đoán được và không nên xảy ra xung đột.
- Tự đồng bộ hóa – Trường đồng bộ trong khung LIN cho phép các nút Follower luôn đồng bộ với nút Leader, loại bỏ nhu cầu sử dụng bộ dao động bên ngoài.
- Giảm thiểu EMI – Tốc độ dữ liệu tối đa 20 kbit/giây và chiều dài đường truyền tối đa 40m giúp giảm thiểu Nhiễu điện từ (EMI).
- Chế độ tiết kiệm điện – Chế độ Ngủ được sử dụng hiệu quả khi chỉ có các sự kiện xảy ra lẻ tẻ (ví dụ như nhấn nút) và bus không được sử dụng trong trường hợp khác.
Ứng dụng LIN
Tính đơn giản và chi phí thấp của LIN khiến nó trở thành một lựa chọn hấp dẫn cho các hệ thống con ô tô, nơi tốc độ và băng thông không phải là mối quan tâm chính. Các phương tiện ngày nay chứa nhiều cụm LIN để điều khiển các hệ thống con này và giao tiếp với mạng CAN của phương tiện thông qua các bộ dẫn LIN. Các ứng dụng ô tô mà LIN được sử dụng hiện nay bao gồm:
- Cụm vô lăng – radio, kiểm soát hành trình, đèn báo rẽ, cần gạt nước kính chắn gió, kiểm soát khí hậu.
- Cụm tiện nghi – cảm biến nhiệt độ, cửa sổ trời, ánh sáng, độ ẩm.
- Hệ thống truyền động – cảm biến tốc độ, vị trí hoặc áp suất.
- Cụm động cơ – cảm biến, động cơ nhỏ, động cơ quạt làm mát.
- Cửa xe – gương chiếu hậu, cửa sổ, điều khiển ghế và khóa.
- Ghế – cảm biến người ngồi, động cơ vị trí.
Ngoài lĩnh vực ô tô, bus LIN ngày càng được áp dụng rộng rãi trong thị trường thiết bị và công nghiệp vì nó cung cấp một tùy chọn giá rẻ, nhiều tính năng cho các ứng dụng có nhiều nút được kết nối, chẳng hạn như:
- Thiết bị sản xuất.
- Máy giặt.
- Tủ lạnh.
- Bếp.
- Lò nướng.
- Máy gia công kim loại.
Đối với các ứng dụng ô tô giá rẻ, tốc độ thấp, Mạng kết nối cục bộ (LIN) là một giao thức quan trọng. Trong môi trường ô tô, LIN cung cấp một giải pháp hấp dẫn cho nhiều hệ thống con với các tính năng độc đáo và thiết kế hiệu quả. Hơn nữa, một vai trò bắt buộc trong thiết kế và vận hành các phương tiện hiện đại được thực hiện bởi tích hợp LIN và CAN, cung cấp một phương pháp tiếp cận mạng lưới thanh lịch, tiết kiệm chi phí và giàu chức năng. Việc hiểu sâu hơn về LIN, cả như một hệ thống độc lập và kết hợp với CAN, là điều cần thiết để hiểu được động lực phức tạp và những tiến bộ định nghĩa mạng lưới ô tô hiện đại.
- Sự phát triển của Điện – Điện tử trong ô tô
- Cơ bản về hệ thống điện tử ô tô
- Tiêu chuẩn an toàn và tuân thủ trong điện tử ô tô
- Hệ thống điện tử ô tô: Các thành phần điện tử trên ô tô – Phần 1
- Hệ thống điện tử ô tô: Các thành phần điện tử trên ô tô – Phần 2
- Hệ thống điện tử ô tô: Kiến trúc điện tử xe cộ
- Hệ thống điện tử ô tô: Hệ thống điện xe
- Automotive Networking: Cơ sở lý luận và tầm quan trọng của mạng ô tô
- Automotive Networking: Yêu cầu về kết nối mạng ô tô
- Bus Systems – Giới thiệu Hệ thống Bus trên ô tô
- Bus Systems – Mạng khu vực điều khiển (CAN)
- Bus Systems – Mạng kết nối cục bộ (LIN)
- Bus Systems – FlexRay
- Bus Systems – Automotive Ethernet và MOST
- Automotive Networking: Mạng lưới pin
- Cơ bản về quản lý năng lượng ô tô
- Mạng lưới phân phối điện trên ô tô
- Bộ Điều Khiển Động Cơ (ECU)
- Vai trò của Điện tử công suất trong Quản lý Động cơ.
- Hệ thống điều khiển phun nhiên liệu
- Điều Khiển Hệ Thống Đánh Lửa (Ignition System Controls)
- Xe điện (Electric Vehicles) và Hệ thống Năng lượng Hybrid (Hybrid Power Systems)
- Chuyển đổi Năng lượng và Quản lý Năng lượng trong Xe điện (EVs)
- Chức năng và Yêu cầu của Ắc quy Khởi động (Starter Batteries)




{kind=link}