






Dẫn động 4 bánh, đơn giản là truyền năng lượng từ động cơ đến tất cả các bánh xe (mô men xoắn). Và khi nói đến độ bám đường hay lực kéo, thì chắc chắn dẫn động 4 bánh (4-Wheel Drive) sẽ tốt hơn 2 bánh. Từ thời kỳ đầu của lịch sử ô tô, các kỹ sư đã thử các ý tưởng về hệ dẫn động 4 bánh. Tuy nhiên, các ứng dụng thành công chỉ được sử dụng trong quân sự và offroad (ví dụ như Jeep và Land Rover) cho đến năm 1967, khi Jensen FF đưa hệ thống Ferguson Formula vào thị trường xe đường trường. Những chiếc ô tô sản xuất hàng loạt đầu tiên thậm chí còn muộn hơn – Audi Quattro 1980 và AMC Eagle, tính đến thời điểm đó ô tô đã ra đời gần một thế kỷ!

4WD không chỉ là thêm vi sai vào trục trước và liên kết nó với trục sau. Nếu vậy, trục trước và trục sau sẽ quay cùng tốc độ mọi lúc. Khi xe vào cua, bánh trước đi được quãng đường dài hơn do đó quay nhanh hơn bánh sau (xem các vết bánh xe trong hình trên). Nếu buộc phải quay cùng tốc độ, các bánh xe sẽ đấu với nhau, gây trượt quay bánh, mất độ bám đường, nhiều tiếng ồn và mòn lốp. Tệ hơn nữa, việc xử lý sẽ trở nên rất khó lường.
Để giải quyết vấn đề này, rõ ràng, chúng ta cần thêm một vi sai trung tâm ở đâu đó giữa hai trục (hộp phân phối). Điều này cho phép cầu trước và cầu sau quay ở các tốc độ khác nhau khi vào cua. Tuy nhiên, như trong trường hợp xe RWD (Dẫn động cầu sau) hoặc FWD (Dẫn động cầu trước), bộ vi sai mở có thể phản tác dụng khi một bên mất lực kéo. Ví dụ, nếu bánh trước bị trượt, bộ vi sai sẽ truyền nhiều mô-men xoắn hơn từ trục sau sang trục trước, khiến bánh xe trước quay nhanh hơn. Đó là lý do tại sao vi sai trung tâm cần phải có chức năng chống trượt.
Do đó, vi sai hạn chế trượt (Limited Slip Differential – Viết tắt là LSD) trung tâm là cốt lõi của công nghệ 4WD. Nói cách khác, hệ thống 4WD có hoạt động tốt hay không phụ thuộc rất nhiều vào loại LSD trung tâm mà nó sử dụng.
Khi chiếc Audi Quattro đầu tiên được phát triển, Audi không tìm được LSD trung tâm phù hợp để phục vụ mục đích sản xuất hàng loạt. Do đó, nó đã sử dụng một bộ vi sai trung tâm mở cộng với một khóa kích hoạt do người lái (vận hành bằng công tắc) để đối phó với những trường hợp trượt. Nhiều chiếc xe 4×4 sau đó thậm chí còn đơn giản hơn, sử dụng hệ thống dẫn động 4 bánh bán thời gian với sự tham gia bằng tay người lái. Tuy nhiên, nhờ nỗ lực của Group B vô địch thế giới, công nghệ 4WD đã phát triển nhanh chóng vào giữa những năm 1980. Năm 1987, Audi giới thiệu bộ vi sai trung tâm Torsen cho Quattro trên đường. Kể từ đó, 4WD cuối cùng đã trở nên thiết thực để sử dụng cho mọi tình huống.
Trong bài viết này, giới thiệu một số 4WD với hộp phân phối phân chia mô-men xoắn kiểu Cơ khí:
Visai Torsen – Hệ thống Audi Quattro
Kể từ khi Ur Quattro được áp dụng vào năm 1987, vi sai Torsen (hiện được đổi tên thành Torsen type A sau khi ra mắt các biến thể loại B và C) đã được sử dụng trên hầu hết các mẫu Audi được trang bị Quattro trong 20 năm tiếp theo (không bao gồm phiên bản ngang – ngắn bắt nguồn từ nền tảng Volkswagen). Vì vậy, có thể nói, nó đã làm cho quattro trở nên nổi tiếng.

Vi sai Torsen sử dụng sự kết hợp đặc biệt của trục vít và bánh vít để cho phép chênh lệch tốc độ giữa hai trục, trong khi trong trường hợp trượt, nó sẽ tự động khóa lại. Vì nó là một thiết kế cơ học thuần túy, nên hầu như không có độ trễ trong phản ứng của nó.
Xe chạy trong điều kiện bình thường mà không bị trượt lốp, bộ vi sai Torsen chia mô-men xoắn 50:50 từ trước ra sau, do đó quattro là hệ dẫn động 4 bánh đối xứng. Trên Ur Quattro, nó có tỷ lệ sai lệch mô-men xoắn (TBR) là 3:1, do đó mỗi trục có thể nhận tới 75% mô men xoắn khi trục kia mất lực kéo. Điều này không thể phù hợp với các hệ thống 4WD mới hơn với bộ vi sai chủ động, nhưng thiết lập Torsen đơn giản hơn, đáng tin cậy hơn nhưng có khả năng xử lý khá nhiều công suất.
Torsen C
Một điểm yếu của bộ vi sai Torsen nguyên bản là phân phối mô-men xoắn 50:50. Nó làm cho những chiếc xe quattro trở nên nổi tiếng về khả năng xử lý kém và chậm chạp (Ur Quattro có lẽ là ngoại lệ duy nhất). Khi JTEKT, nhà sản xuất của Torsen, phát triển một biến thể mới với phân chia mô-men xoắn 40:60, Audi đã ngay lập tức áp dụng điều đó trên RS4 2005 của mình, sau đó là nhiều mẫu xe khác. Trong khi đó, Alfa Romeo cũng sử dụng bộ vi sai Torsen C trên 156 Q4, 159 Q4 và Brera Q4.

Bộ vi sai Torsen C trông rất khác biệt về cấu tạo. Nó có cơ cấu truyền động trục vít được sắp xếp theo kiểu hành tinh. Công suất đến từ hộp số truyền động các bánh răng hành tinh, lần lượt dẫn động bánh răng mặt trời (kết nối với trục trước) và bánh răng trong (kết nối với trục sau) đồng thời. Nhờ có chu vi lớn hơn, bánh răng trong có nhiều răng hơn bánh răng mặt trời. Kết quả là, sự phân chia mô-men xoắn tỷ lệ thuận với số răng, tức là 40:60 từ trước ra sau.

Chức năng giới hạn trượt cũng giống như vi sai Torsen ban đầu. Ở đây, trục vít là bánh răng hành tinh, trong khi bánh vít là bánh răng mặt trời và bánh răng trong. Torsen C có phân chia mô-men xoắn mong muốn hơn trong điều kiện bình thường, nhưng tỷ lệ sai lệch mô-men xoắn của nó vẫn khá thấp.
Bộ vi sai Crown Gear (bánh răng vương miện) – Audi RS5 Quattro
Việc sử dụng vi sai trung tâm Torsen trong hệ thống Quattro của mình hơn 20 năm, Audi cuối cùng đã phát triển một loại vi sai trung tâm mới có tên crown gear differential (vi sai bánh răng vương miện), ra mắt lần đầu trên RS5 Quattro vào năm 2010.
Giống như bộ vi sai Torsen C, bộ vi Crown Gear được mặc định phân chia mô-men xoắn 40:60 giữa cầu trước và cầu sau trong điều kiện bình thường, vì vậy nó có thể mang lại đặc tính xử lý giống với xe dẫn động cầu sau hơn, hay nói cách khác là ít gặp rắc rối bởi Understeer (Thiếu lái – 2 bánh trước bị trượt khi vào cua). Khi trục trước bị mất lực kéo, nó có thể gửi tới 85% mô-men xoắn cho trục phía sau. Khi bánh xe phía sau trượt, nó sẽ truyền tới 70% mô-men xoắn cho bánh xe phía trước. Phạm vi khóa như vậy rộng hơn nhiều so với trường hợp của vi sai Torsen C, do đó, nó sẽ mang lại khả năng xử lý tốt hơn, đặc biệt là khi kết hợp với vi sai cầu sau điện tử véc tơ mô-men xoắn (torque-vectoring) vì trục sau hiện có nhiều mô-men xoắn hơn. Hơn nữa, bộ vi sai Crown Gear có cấu tạo đơn giản hơn và trọng lượng nhẹ hơn Torsen C là 2 kg.

Cấu tạo:
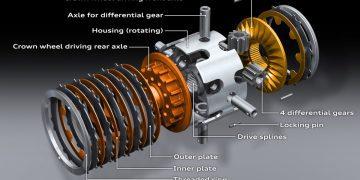
Cấu tạo của bộ vi sai bao gồm thành phần cốt lõi của nó là một cặp bánh răng crown (vương miện) kiểu đĩa. Các bánh răng vương miện được đặt tên như vậy bởi vì chúng thực sự trông giống như vương miện với các răng gắn trên cùng của chúng. Một trong số chúng được gắn vào trục dẫn động trước và một chiếc khác nối với trục dẫn động sau. 4 bánh răng trụ (“bánh răng vi sai”) có trục được gắn ở vỏ vi sai và trung tâm của vi sai. Trung tâm được kết nối chặt chẽ với trục truyền động đầu vào, trục này lấy năng lượng từ hộp số. Để tiết kiệm không gian, trục dẫn động đầu vào đi qua trục truyền động đầu ra rỗng cho trục trước. Ở hai bên của bánh răng vương miện, có một số tấm ma sát. Một nửa trong số chúng kết nối với bánh răng vương miện liền kề và phần còn lại kết nối với vỏ vi sai. Tóm lại, các thành phần kết nối với vỏ vi sai có màu xám trong hình trên. Các thành phần kết nối với trục dẫn động trước và trục sau có màu vàng và đồng tương ứng.
Cách thức hoạt động:
Trong điều kiện bình thường không xảy ra hiện tượng trượt lốp, trục trước và trục sau quay cùng tốc độ. Trục truyền động đầu vào quay cùng với toàn bộ cụm vi sai, bao gồm vỏ vi sai và tất cả các bộ phận bên trong. Vì 2 bánh răng vương miện đang chuyển động cùng tốc độ nên bánh răng trụ đứng yên.
Khi ô tô chuyển động, với trường hợp trục dẫn động phía trước quay nhanh hơn một chút so với trục truyền động phía sau, khi đó sự chênh lệch tốc độ giữa các bánh răng vương miện sẽ làm quay các bánh răng trụ. Nói cách khác, bánh răng trụ cho phép chênh lệch tốc độ giữa cầu trước và cầu sau, do đó nó cung cấp chức năng của bộ vi sai thông thường.

Làm thế nào để nó đạt được sự phân chia mô-men xoắn 40:60 trong điều kiện bình thường? Nhìn vào hình trên và bạn sẽ tìm thấy cặp bánh nhỏ chủ động ở các vị trí khác nhau của bánh răng vương miện. Bán kính khớp nối (khoảng cách từ điểm khớp nối đến tâm trục) của bánh răng vương miện phía trước ngắn hơn so với bánh răng vương miện phía sau. Tỷ lệ giữa chúng chính xác là 40:60. Từ vật lý đơn giản, chúng ta biết Mô-men xoắn = Lực x Bán kính. Trong điều kiện ổn định, Lực tác động lên cả hai bánh răng vương miện là bằng nhau (nếu không, lực tổng hợp sẽ quay và tăng tốc bánh răng trụ), do đó Mô-men xoắn tỷ lệ với Bán kính, do đó giải thích tại sao phân chia mô-men xoắn là 40:60.
Khó khăn hơn là chức năng trượt hạn chế (limited-slip). Răng của bánh răng vương miện có hình dạng đặc biệt sao cho khi bánh răng trụ quay, dạng hình học của răng tạo ra lực dọc trục để đẩy bánh răng vương miện ra ngoài. Điều này làm cho các tấm ma sát ở hai bên bị nén, khóa một phần bánh răng vương miện vào vỏ vi sai. Vì lực dọc trục không đủ mạnh để khóa hoàn toàn các tấm ma sát, bộ vi sai không thể truyền 100% mô-men xoắn đến một trục, không giống như trường hợp LSD chủ động hoặc cơ học, nhưng phạm vi truyền của nó là 15-70% đối với bánh trước và 30 -85% cho bánh sau đã đủ tốt để xử lý trong hầu hết các tình huống. Trong trường hợp cực đoan khi một trục mất gần như toàn bộ lực kéo, Audi sử dụng khóa vi sai điện tử EDL (electronic differential lock) để phanh các bánh xe đang quay và truyền mô-men xoắn sang các bánh xe khác.
Khớp nối nhớt – Volkswagen Syncro
Khớp nối nhớt (VC) từng được sử dụng rộng rãi trong nhiều hệ thống 4WD đơn giản vì nó rẻ để chế tạo. Nó được sử dụng trên AMC Eagle 1980 (một trong những chiếc xe đường bộ sản xuất hàng loạt có 4WD đầu tiên), nhưng được biết đến nhiều hơn với tên gọi Syncro, đã phục vụ cho rất nhiều mẫu xe Volkswagen từ cuối những năm 1980 cho đến khi hệ thống Haldex-clutch 4motion tiếp quản. Nó cũng đã được sử dụng bởi Lamborghini Diablo VT và Murcielago, Porsche 993 và 996, Volvo 850 AWD, v.v. như cách đơn giản nhất để thêm 4WD.

Cấu tạo của bộ khớp nối nhớt rất đơn giản. Bên trong hộp vi sai có nhiều tấm hình tròn đặt rất gần nhau. Một nửa trong số chúng kết nối với trục truyền động phía trước, và phần còn lại kết nối với trục truyền động phía sau. Vỏ kín chứa đầy chất lỏng có độ nhớt cao, có xu hướng dính chặt các tấm đó với nhau.
Trong điều kiện vận hành bình thường, trục trước và trục sau quay cùng tốc độ, do đó đĩa và chất lỏng nhớt quay cùng nhau mà không có sự dịch chuyển tương đối. Khi lốp xe bị trượt ở một trong các trục, các đĩa quay xen kẽ sẽ quay với tốc độ khác nhau, do đó chất lỏng nhớt cố gắng kết dính chúng lại với nhau. Kết quả là, mô-men xoắn được truyền từ trục truyền động nhanh hơn qua chất lỏng đến trục truyền động chậm hơn. Chênh lệch tốc độ càng lớn thì càng nhiều mô-men xoắn nó truyền đến trục truyền động chậm hơn và nó càng chống lại trục truyền động nhanh hơn. Nói cách khác, nó cung cấp chức năng chống trượt.
Không giống như vi sai Torsen, VC thụ cảm tốc độ hơn là mô-men xoắn. Điều này có nghĩa là sự truyền mô-men xoắn của nó không bị giới hạn bởi TBR (Torque Bias Ratio). Nếu một trục đang chạy trên băng hoặc thậm chí được nâng lên trong không khí, nó sẽ truyền gần như toàn bộ mô-men xoắn sang trục kia.
Về mặt nhược điểm, khi lốp không bị trượt do đó không có sự chênh lệch tốc độ giữa các trục, không có mômen quay được truyền sang trục khác. Điều này có nghĩa là hệ thống Syncro vẫn FWD khi lái xe bình thường và chỉ chuyển sang 4WD khi đường trơn trượt. Nói cách khác, đó là một hệ thống 4WD bán thời gian.
Một điểm yếu khác là sự chậm trễ trong phản hồi. Vì chất lỏng nhớt là một môi trường linh hoạt, nó không phản ứng nhanh như bánh răng. Hơn nữa, mối quan hệ giữa truyền mô-men xoắn và sự chênh lệch tốc độ là cấp số nhân. Điều này có nghĩa là có rất ít mômen truyền ở giai đoạn trượt ban đầu. Để giải quyết vấn đề này, hầu hết các nhà sản xuất điều chỉnh tỷ số truyền động cuối cùng sao cho có một sự khác biệt nhỏ về tốc độ để tải trước VC. Kết quả là, chiếc xe chạy với mô-men xoắn 95:5 trong điều kiện bình thường. Điều này rút ngắn thời gian trễ, nhưng vẫn không thể sánh với vi sai Torsen.
Hơn nữa, dầu nhớt có tuổi thọ hạn chế. Khi dầu nhớt đến giới hạn, toàn bộ VC phải được thay thế. Do đó, khi thiết lập Haldex-clutch xuất hiện vào cuối những năm 1990, 4WD khớp nối nhớt bắt đầu bị loại bỏ dần.
Khóa vi sai khớp nối nhớt – Subaru Impreza WRX
Nhiều xe đua đặc biệt của Nhóm A trong những năm 1990 đã sử dụng loại vi sai trung tâm này, chẳng hạn như Subaru Impreza WRX, Toyota Celica GT-Four, Mitsubishi Lancer Evo I đến VI và Ford Escort RS Cosworth. Về cơ bản Khóa vi sai khớp nối nhớt (Viscous-Coupling Differential Lock – VCDL) là một bộ vi sai mở được thêm vào một khớp nối nhớt để cung cấp chức năng chống trượt. Bộ vi sai thường cung cấp phân chia mô-men xoắn 50:50. Khi xảy ra hiện tượng trượt, khớp nối nhớt hạn chế sự chênh lệch tốc độ đồng thời truyền nhiều mô-men xoắn hơn đến trục với lực kéo tốt hơn. Do đó, VCDL là một hệ thống 4WD vĩnh viễn, nhưng nó có chung một số nhược điểm của vi sai VC, chẳng hạn như phản ứng chậm, truyền mô-men xoắn không tuyến tính và các vấn đề về tuổi thọ.

Một số thiết kế sử dụng vi sai theo hành tinh thay vì vi sai thông thường để cho phép sai lệch mô-men xoắn phía trước hoặc phía sau một chút. Ví dụ: Lancia Delta S4 (30:70) và Delta HF Integrale (56:44, 47:53), Peugeot 205 T16 (33:67), Mitsubishi GTO (45:55) và Bugatti EB110 (27:73).
Nhiều khóa vi sai khớp nối nhớt đã được thay thế bằng bộ vi sai trung tâm chủ động tiên tiến hơn. Tuy nhiên, vì sự đơn giản và chi phí thấp, Subaru vẫn tiếp tục sử dụng nó trên WRX thông thường, trong khi STi được trang bị DCCD.
Xem thêm: Dẫn động 4 bánh – 4WD với phân chia mô-men xoắn điều khiển điện tử (phần 1)







{kind=link}